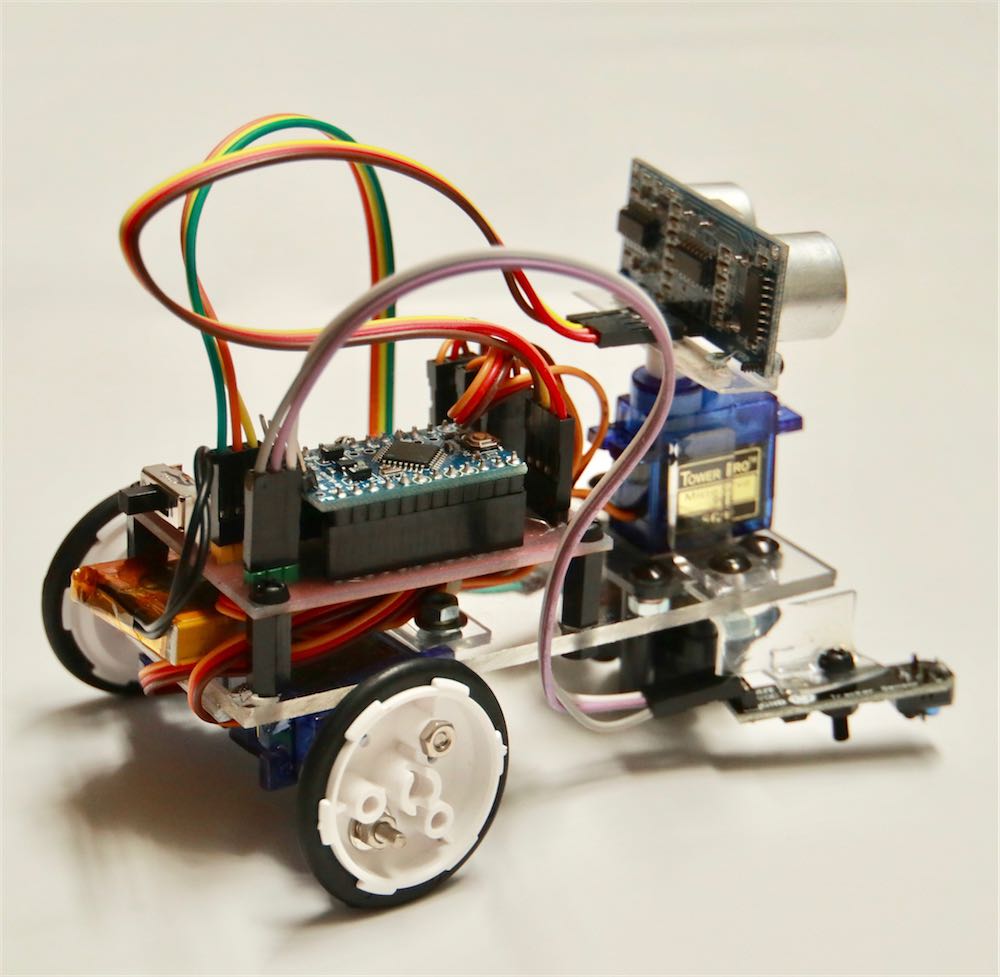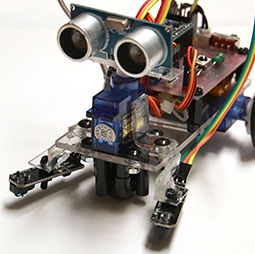
マイクロキャット5号
マイクロキャットに赤外線リモコンを搭載
今までマイクロキャットは「自立走行」と、言いながら勝手に走るだけだった。
これをリモコンロボットに改造したのが5号だ。
と言っても、ただリモコンで動かすだけでは無く、4号までで培った障害回避・落下防止の機能も搭載した上でのコントロールだ。
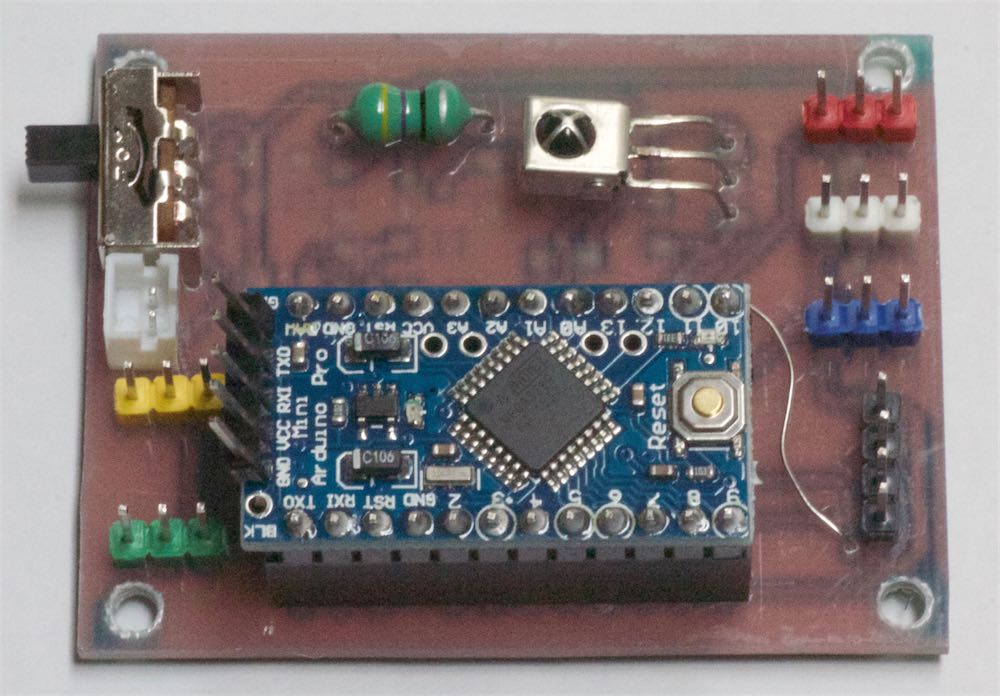
リモコンには赤外線リモコンを使った。赤外線レシーバーは以前にも何回か使って、実績もあったしハードウェア的に簡単に実装できることが分かっていたからだった。
ただし、今回はハマってしまった。シミュレーションでは動作するのだが、実機に載せると暴走してしまう。
原因が分からず、しばらく放置してあったのだ。
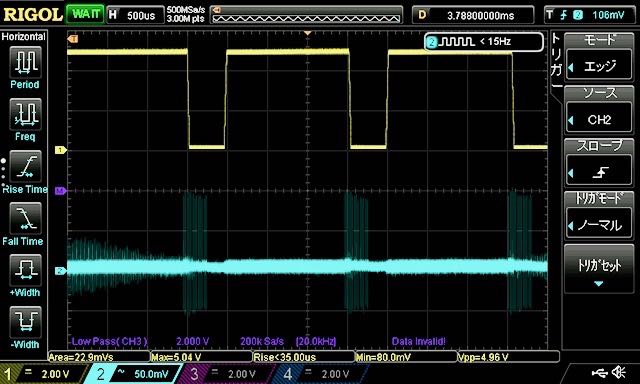
実機をオシロスコープで波形を見てみてやっと分かった。赤外線レシーバーは結構ノイズに弱いのだ。高倍率のアナログアンプを内蔵しているので当然と言えば当然だが、電源のスイッチングのイズがその原因だった。
詳しくは下記を参照してください。